Educative Robots
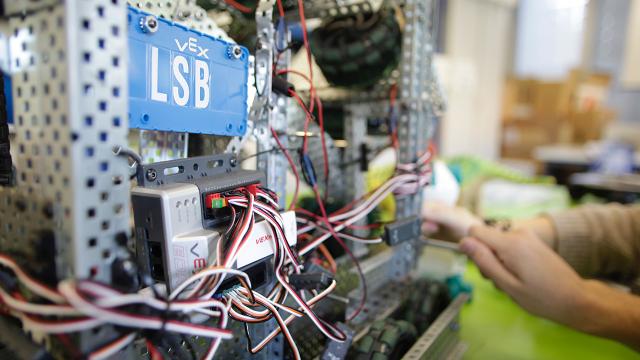
The Educative Robots with which this laboratory is equipped are the Bioloid of Robotis and the LEGO Mindstorms, together with the Omnia robots developed by La Salle and necessary for the intensification and specialization in Robotics.
All this robots are programmed from 3 differentiated environments. The Metlab, which is used for studying and modeling the different systems (electronic and mechanic), besides the application of all kind of modern controllers and artificial intelligence applied to robotics. The C language is use for doing optimized programming in the different models of Robots; and the NXT-G, proprietary software, as graphic programming systems.
Industrial Robots
It is an application that simulates the assembly process of a piece in which an industrial robotic arm takes part. Most of the sensors and pneumatic elements as the robotic arm are controlled by a Schneider Electric PLC (TSX_Premium) and a Magelis tactile screen. Aside from the Ethernet communication integrated in the CPU, the PLC also has CANopen communication.
This application’s main objective is to learn about controlling and programming industrial robotic arms. This is possible thanks to the COSIMIR software, which permit to verify the program before transferring through a 3D simulating environment.